|
1-
|
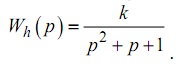
Hàm truyền đạt của hệ hở có dạng:
Với điều kiện nào của k thì hệ kín tương ứng ổn định?
|
|
|
A -
|
k < −1
|
|
|
B -
|
k > −2
|
|
|
C -
|
k > −1
|
|
|
D -
|
k < −2
|
|
2-
|
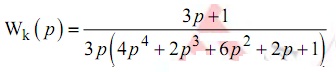
HTĐKTĐ có hàm truyền đạt dạng:
Hệ thống đó là:
|
|
|
A -
|
Ổn định
|
|
|
B -
|
Không ổn định
|
|
|
C -
|
Không thể xét ổn định được
|
|
|
D -
|
Ở biên giới ổn định
|
|
3-
|
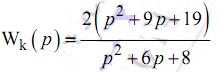
HTĐKTĐ có hàm truyền đạt dạng:
Xác định các điểm cực, điểm không của hệ thống?
|
|
|
A -
|
Điểm không: Z1 = -5,62 ; Z2 = -2 ; điểm cực: P1 = -4; P2 = -3,38
|
|
|
B -
|
Điểm không: Z1 = -2 ; Z2 = -4; điểm cực: P1 = -5,62; P2 = -3,38
|
|
|
C -
|
Điểm không: Z1 = -5,62 ; Z2 = -4; điểm cực: P1 = -2; P2 = -3,38
|
|
|
D -
|
Điểm không: Z1 = -5,62; Z2 = -3,38; điểm cực: P1 = -2 ; P2 = -4
|
|
4-
|
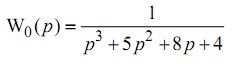
Cho hệ thống có đối tượng điều khiển:
và bộ điều khiển: W c(p) = K P + K Dp ( Bộ PD)
Tìm phương trình đặc trưng của hệ thống kín?
|
|
|
A -
|
|
|
|
B -
|
|
|
|
C -
|
|
|
|
D -
|
|
|
5-
|
Sai số ở trạng thái xác lập được tính theo công thức nào ( e(t)
là sai lệch động còn tồn
tại trong quá trình điều khiển)?
|
|
|
A -
|
|
|
|
B -
|
|
|
|
C -
|
|
|
|
D -
|
|
|
6-
|
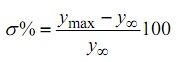
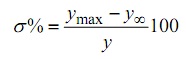
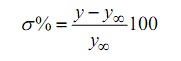
Độ quá điều chỉnh của điều khiển được xác định theo công thức nào?
|
|
|
A -
|
|
|
|
B -
|
|
|
|
C -
|
|
|
|
D -
|
|
|
7-
|
Biến đổi Laplace của hàm
u(t) = kt
?
|
|
|
A -
|
k/p
|
|
|
B -
|
kp
|
|
|
C -
|
k/p2
|
|
|
D -
|
kp2
|
|
8-
|
Muốn tìm mức độ ổn định λ , ta thay biểu thức nào sau đây vào phương trình đặc
trưng của hệ thống?
|
|
|
A -
|
p = -λ + jω
|
|
|
B -
|
p = λ + jω
|
|
|
C -
|
p = λ - jω
|
|
|
D -
|
p = -λ - jω
|
|
9-
|
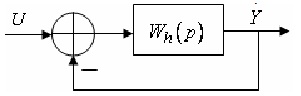
Nếu HTĐKTĐ được mô tả như hình trên thì mối quan hệ giữa
E(p)
và
Y(p)
là?
|
|
|
A -
|
|
|
|
B -
|
|
|
|
C -
|
|
|
|
D -
|
|
|
10-
|
Muốn triệt tiêu sai lệch tĩnh của hệ thống, thông thường người ta sử dụng thêm khâu
cơ bản nào dưới đây?
|
|
|
A -
|
Tích phân
|
|
|
B -
|
Vi phân
|
|
|
C -
|
Khuếch đại
|
|
|
D -
|
Khâu trễ
|